
Research progress on the flight mechanism of butterfly and butterfly-inspired flapping-wing air vehicles
-
摘要:
仿生扑翼飞行器具有高机动性、高隐蔽性以及高效率等突出优势,在军事侦查、探险搜救等领域具有较好的应用前景,而其应用的基础是对生物飞行机理的深入探究. 随着先进运动观测和实验技术的引入,对昆虫飞行行为的记录和分析更为便捷和准确. 研究表明常见的昆虫拍打频率较高,在25~400 Hz之间,而蝴蝶较为特殊,其扑打频率较低,大约为10 Hz,对于蝴蝶的许多独特的飞行技能尚缺少足够的认识. 蝴蝶前翼和后翼的翼面积都较大,身体同侧的前后翼几乎为同步拍打,且扑打幅度较大,甚至接近180°. 蝴蝶飞行中身体有较大幅度的上下和俯仰震荡,翼和身体运动高度耦合. 即便如此,蝴蝶仍具有敏捷的飞行能力,可以达到点对点的飞行目标,甚至上千公里的长途迁徙,是优秀的仿生学研究对象. 因此,蝴蝶启发的仿生扑翼飞行器也得到了全世界研究人员的关注. 蝴蝶的飞行机制相对于其他昆虫更加特殊,飞行行为和气动特性更为复杂,这使得仿蝴蝶扑翼飞行器的研制更加困难. 目前对于仿蝴蝶飞行器的研制大多数对蝴蝶翼–身耦合的机理进行了简化,很少能实现受控的稳定飞行. 最后,本文梳理了真实蝴蝶的飞行行为特点和飞行机理,指出了仿蝴蝶扑翼飞行器研制的关键技术,总结了该类飞行器未来的发展方向和应用前景.
Abstract:Bionic flapping-wing air vehicles present notable advantages, including high maneuverability, concealment, and efficiency. They hold promising applications in military reconnaissance and exploration search and rescue, rooted in a comprehensive exploration of biological flight mechanisms. Advanced motion observation and experimental techniques have facilitated more convenient and precise recording and analysis of insect flight behavior. Research indicates that common insects exhibit a high flapping frequency, ranging from 25 to 400 Hz, while butterflies, characterized by a lower flapping frequency of approximately 10 Hz, stand out. Despite the unique attributes of butterfly flight, aerodynamic research remains scarce compared to other flying organisms, resulting in an insufficient understanding of their intricate flying skills. Butterflies, distinguished by large forewings and hindwings that flap nearly synchronously on the same side of the body, spanning a substantial range of up to 180°, display substantial pitch swing during flight, with highly coupled wing and body movements. Remarkably, despite these complexities, butterflies demonstrate agile flight capabilities, enabling them to embark on long-distance migrations spanning thousands of kilometers. This exceptional characteristic renders them exemplary subjects for bionics research, capturing the attention of scholars globally. In contrast to other insects, butterflies have a uniquely intricate flight mechanism, complicating the development of butterfly-inspired flapping-wing air vehicles. Current endeavors in this field often simplify the mechanism of butterfly wing–body motion coupling, with only a few achieving controlled and stable flight. Simultaneously, the ongoing advancements in microelectromechanical system technology, aerodynamics, and precision processing are insufficient to support the development of practical insect-scale flapping-wing air vehicles fully. Accordingly, researchers have adopted a bionic perspective, observing butterflies’ free flight to understand their flapping-wing flight mechanism via experimental and numerical analysis methods. By the similarity principle of fluid mechanics, adjusting the scale, lowering the flapping frequency, and emulating butterflies’ distinctive flight motion in engineering, a butterfly-inspired flapping-wing air vehicle with a small aspect ratio and ultra-low frequency flapping was conceptualized and fabricated. Although current prototypes can achieve remote-controlled flight, a considerable disparity persists when compared to the flight behavior and capabilities of actual butterflies. Furthermore, most prototypes suffer from subpar battery life due to energy limitations. In comparison to flapping aircraft mimicking birds or larger insects with a high aspect ratio, butterflies have more intricate flapping movement and tailless posture control. Their unique maneuvering flight control, involving coupled and cooperative wing–body movements, demands further comprehensive exploration. Thus, achieving prolonged, controllable, and agile flight in a butterfly-inspired flapping-wing air vehicle poses a considerable challenge. Consequently, this paper synthesizes the distinctive flight behavior and mechanisms observed in living butterflies, elucidating key technologies for developing butterfly-inspired flapping-wing air vehicles. It also delineates the future trajectory for advancing this aircraft category.
-
近年来雷诺数103到104量级的大型飞行昆虫—蝴蝶的飞行机理及其气动特性引起了研究人员的关注[1−3],其飞行一个重要特点是扑动频率很低,并且雷诺数较低,这与其他高频扑翼生物飞行运动特征不同,产生升力的机制也有所差别,因此,蝴蝶的高升力机制有待深入研究[4]. 宏观上看,蝴蝶的飞行轨迹相对复杂,具有较大波动. 蝴蝶扇翅的幅度较大(甚至接近180°),频率较低(10 Hz左右),且伴随着和身体运动的高度耦合,这使得蝴蝶的扑翼飞行机理较其他飞行昆虫更为复杂.
对蝴蝶飞行机理的研究存在以下挑战. 首先,蝴蝶扑翼飞行运动本身具有低频、大幅值的特征;前翼存在前掠–后掠运动(“Lead–lag motion”),即前翼下扑时沿机体纵轴方向向前掠,前后翼重叠面积减小,上扑时相反;同时,翼沿展向存在一定的扭转角. 这些都与蝴蝶飞行性能有着一定的关系[5]. 其次,由于蝴蝶的双翼质量占比较高并长在其胸部位置,在气动力和惯性力的共同作用下,大幅度的扑翼运动会使得胸部输出与拍打同频率的俯仰震荡,在绝大多数飞行状态下(如起飞、悬停、前飞等),腹部都会伴随胸部的俯仰震荡而摆动,这在一定程度上会影响蝴蝶纵向飞行的稳定,甚至一些机动飞行的表现[6−7]. 最后,蝴蝶双翼在飞行过程中呈现出多方向的大柔性变形[8]、身体各个部位(胸部、腹部、前翅和后翅)的运动高度耦合,和其他飞行生物如鸟类和大展弦比、高频扑打的昆虫相比,蝴蝶的飞行机制更为复杂. 正因为蝴蝶复杂的扑翼飞行具有非定常、不稳定等特点,目前世界上对仿生蝴蝶扑翼飞行器的研究较少,设计蝴蝶启发的可控扑翼飞行器是对该航空飞行新结构和新原理的探索.
1. 蝴蝶扑翼飞行机理
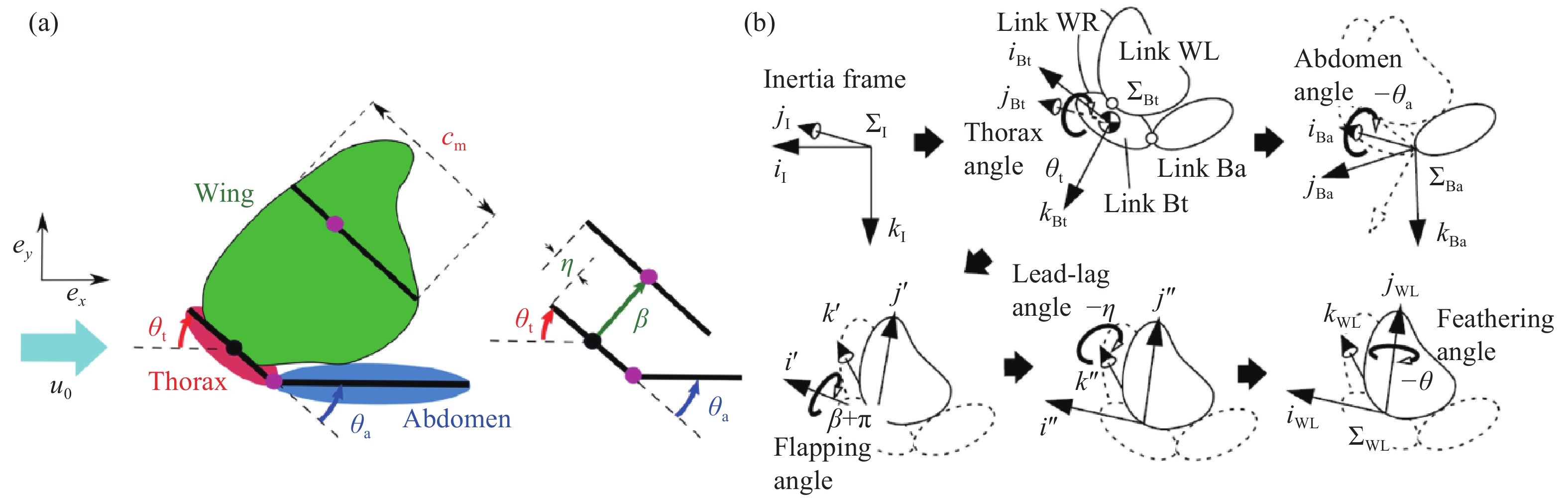
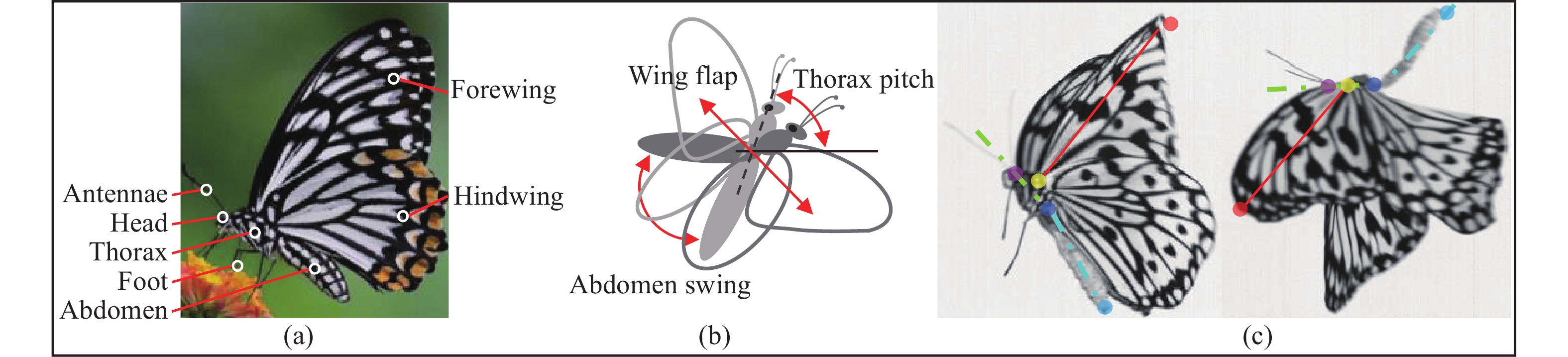
对蝴蝶飞行机理的探究是在对一般昆虫飞行机理探究的基础之上进行的. 早期的工作主要是对蝴蝶飞行运动学观测和气动力的定性分析. 图1(a)为蝴蝶(斑凤蝶)身体各部分组成示意图. 图1(b)中展示蝴蝶飞行过程中的三种基本特征运动:翼扑打、胸部俯仰以及腹部摆动[9]. 利用高速摄影技术可以清晰地获得蝴蝶翼大幅度扑打与腹部大幅度摆动的影像,如图1(c)所示. 近30年来,随着对昆虫飞行运动观测及分析技术的不断提升,蝴蝶飞行的运动学特性及飞行机理得以揭示.
![]()
1.1 蝴蝶自由飞行观测
Ellington[10],Betts等[11],Brodsky[12],Dudley[13]很早就对蝴蝶这类扑动小展弦比翼飞行的昆虫进行了研究,他们借助高速摄像机对蝴蝶前飞和机动飞行时身体与翼的相对运动进行了观测分析. Ellington[10,14−15]指出蝴蝶的扑打平面并非水平,在下扑时,翼扑打与运动方向垂直,在上扑时,翼会发生一定程度的扭转,此时翼扑打与运动方向平行. 他提出蝴蝶在下扑时几乎相对空气“迎面”扇动翅膀,通过压差阻力的机制来产生升力. Dudley[13,16]利用观测结合统计学的方法研究了多种热带蝴蝶的飞行规律,在统计分析15种蝴蝶的生物形态学和运动学参数的基础上,通过准定常方法计算蝴蝶扑翼产生的气动力,结果表明,即便处在快速前飞状态下,蝴蝶的升力产生仍存在非定常气动机制作用. Betts和Wootton[11]通过对野外自由飞行蝴蝶的运动学和形态学分析指出蝴蝶飞行性能和翼形状有关,展弦比、翼载荷和翼惯性都可对其飞行行为进行预测. Brackenbury等[17]利用高速摄像技术对30种蝴蝶的翼运动进行分析,指出了蝴蝶翼因大柔性变形而产生的拍合–剥离机制(“Clap and peel”)对其下扑开始阶段高升力产生的重要作用. 阿拉巴马大学的Cranford和Kang等[18−19]通过Vicon动捕系统追踪粘贴于蝴蝶身上的反光标记点的方法,研究黑脉金斑蝶的爬升飞行. 他们指出蝴蝶身体的波动随着扑翼幅值的增大而增大,随着蝴蝶的翼载荷的增大而减小,在所有昆虫的翼载荷中蝴蝶的相对较低.
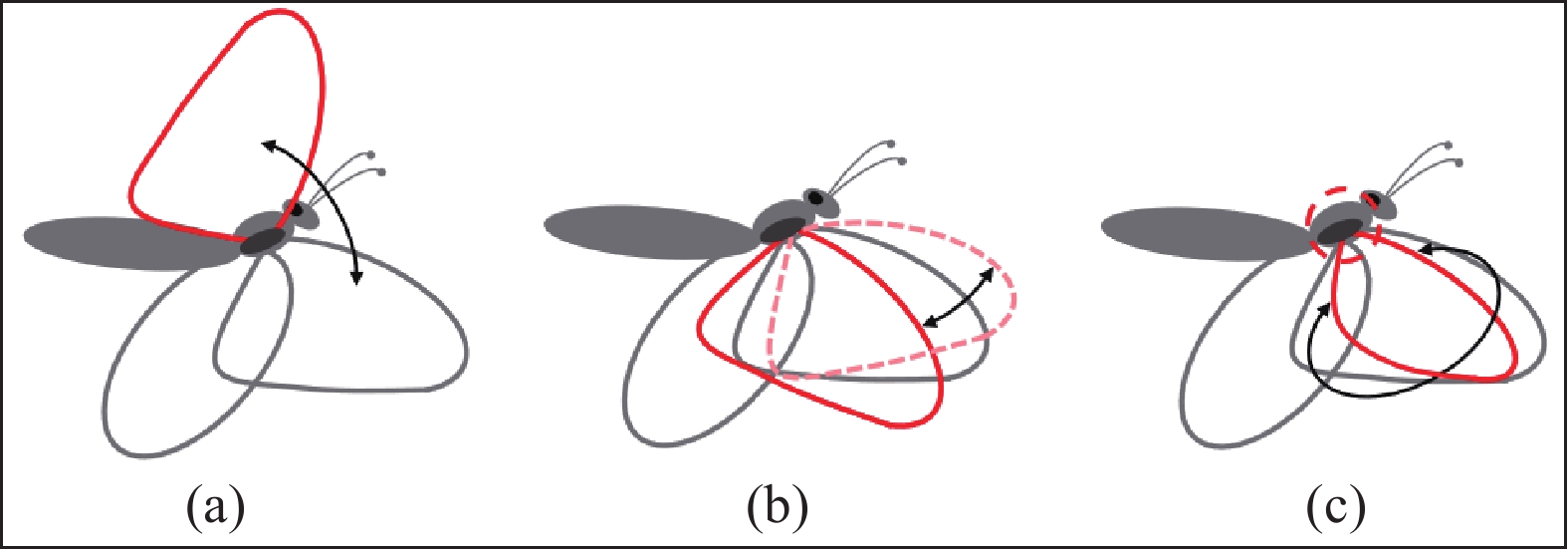
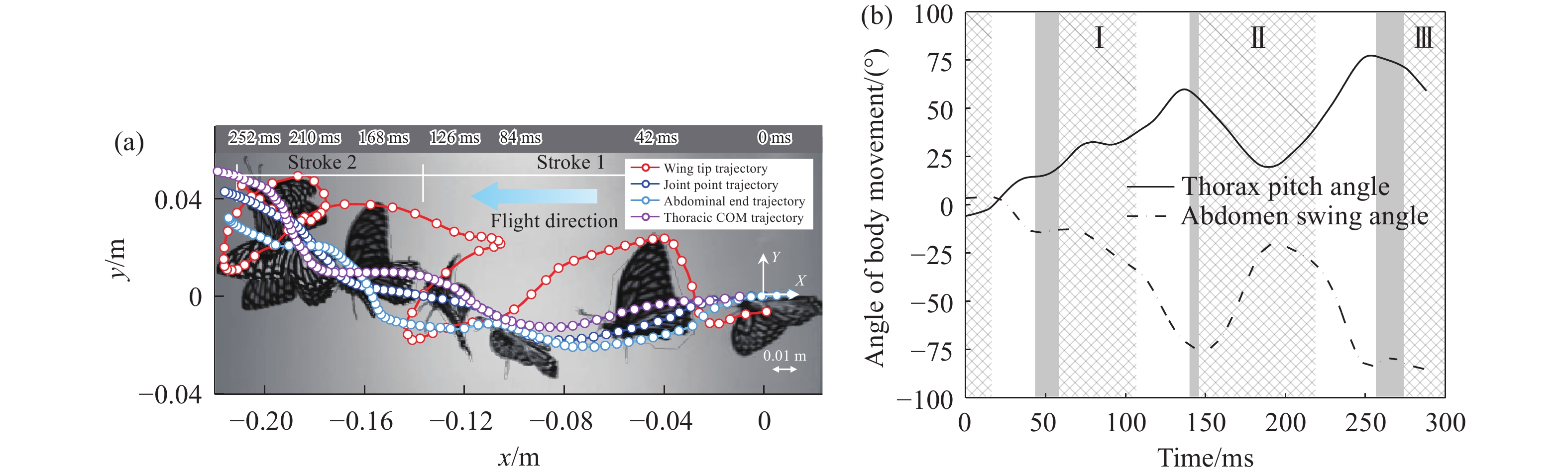
Imura等[5]研究了自然蝴蝶双翼在飞行中的动态行为,如图2所示. 通过对自由飞行和固定飞行的小红蛱蝶(Cynthia cardui)进行观测和图像分析,计算正在飞行的蝴蝶的扑打角、前翼的前掠–后掠角及翼扭转角,并阐明它们之间的相位关系. 在自由和固定飞行中,蝴蝶不仅通过改变拍动角度,还通过改变前翼的前掠–后掠角来调整拍动运动. 随后,Tanaka和Shimoyama[20]指出燕尾蝶(Papilio karna)的翅膀运动基本上仅限于拍打,因为它们的前翼与后翼部分重叠,在结构上限制了主动控制空气动力所需的扭转,他们试图通过研制一种仿燕尾蝶的微型扑翼机研究样机飞行来验证该现象. 因此,不同品种的蝴蝶其扑翼行为也存在差异. Fujikawa等[21−22]利用高速摄像机对蝴蝶飞行过程中翼扑打角. 身体俯仰角及腹部的摆动角度等数据进行了详细的记录和分析,实验表明蝴蝶腹部摆动能够改变身体俯仰角进而改变蝴蝶翼扑打轴与水平面的夹角. 北京航空航天大学的张益鑫等[9,23]利用高速摄像技术,完成了对自由飞行斑凤蝶(Chilasa clytia)的精确运动学观测,如图3所示. 提出了蝴蝶前飞运动三种关键特征运动,即翼扑打、胸部俯仰和腹部摆动运动,利用傅里叶级数拟合了简化的特征运动方程. 根据观测结果提出了蝴蝶双翼的近拍合–剥离机制,因此蝴蝶翼刚度分布及整体柔性对其升推力产生存在较大影响.
![]() 图 2 蝴蝶双翼在飞行中的三种动态行为. (a) 扑打运动;(b) 前掠–后掠运动;(c) 扭转运动Figure 2. Three dynamic behaviors of butterfly wings in free flight: (a) flapping motion; (b) lead–lag motion; (c) feathering motion
图 2 蝴蝶双翼在飞行中的三种动态行为. (a) 扑打运动;(b) 前掠–后掠运动;(c) 扭转运动Figure 2. Three dynamic behaviors of butterfly wings in free flight: (a) flapping motion; (b) lead–lag motion; (c) feathering motion![]()
1.2 蝴蝶飞行气动实验及仿真建模
早在1993年,日本学者Sunada等[24]在对黑纹粉蝶(Pieris melete)的起飞阶段进行观测研究的基础上,利用数值方法定量地研究了蝴蝶起飞时的运动学和空气动力学问题,包括非定常流动. 他们使用非定常面元法计算了起飞时翅膀打开的气动力,发现该蝴蝶是用拍合–打开机制来产生起飞时的大升力的. Srygley和Thomas等[25]训练优红蛱蝶(Vanessa atalanta)在风洞中自由飞行来研究其非定常机制,通过烟流显示实验得到扑翼过程中翼周围流场的涡结构,他们指出蝴蝶的高升力是由尾迹捕获、两种不同前缘涡、主动和非主动上扑、不同于拍合–打开机制的拍合–剥离机制等众多不同的非定常机制共同作用产生的. Jayakumar等[6]用数值方法分析了腹部运动在蝴蝶扑翼飞行俯仰稳定性中的作用,其所建二维有腹部摆动的蝴蝶模型忽略了占比不到10%的蝴蝶翼的质量,经过仿真分析他们得出结论:腹部对维持蝴蝶短周期飞行的稳定性具有重要作用,翼的前掠–后掠运动控制能够使其获得长周期飞行稳定性. Senda等[26−28]对活体蝴蝶飞行进行了大量的实验观察,发现蝴蝶具有节律性的周期运动. 但是,其稳定飞行仍存在许多未知点,如蝴蝶如何快速切换运动模式、身体如何控制等. 对此他们建立了一套低速风洞实验系统,定量研究了蝴蝶的运动和气动力,通过烟流对扑翼产生的流场和涡结构进行可视化. 最终提出了四种蝴蝶扑翼的影响因素[27],它们分别是左右翼的相互作用、机翼扑动的阻力效应、翼尖涡诱导下洗流和翼剥离机制.
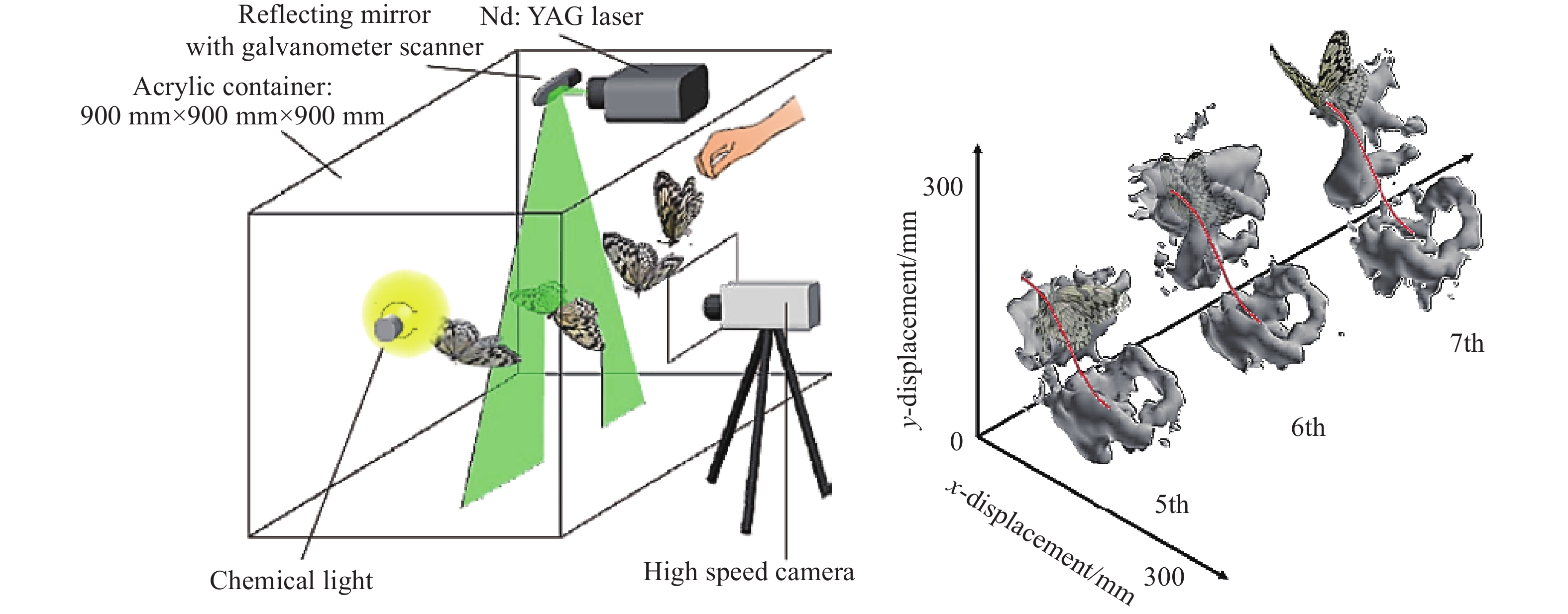
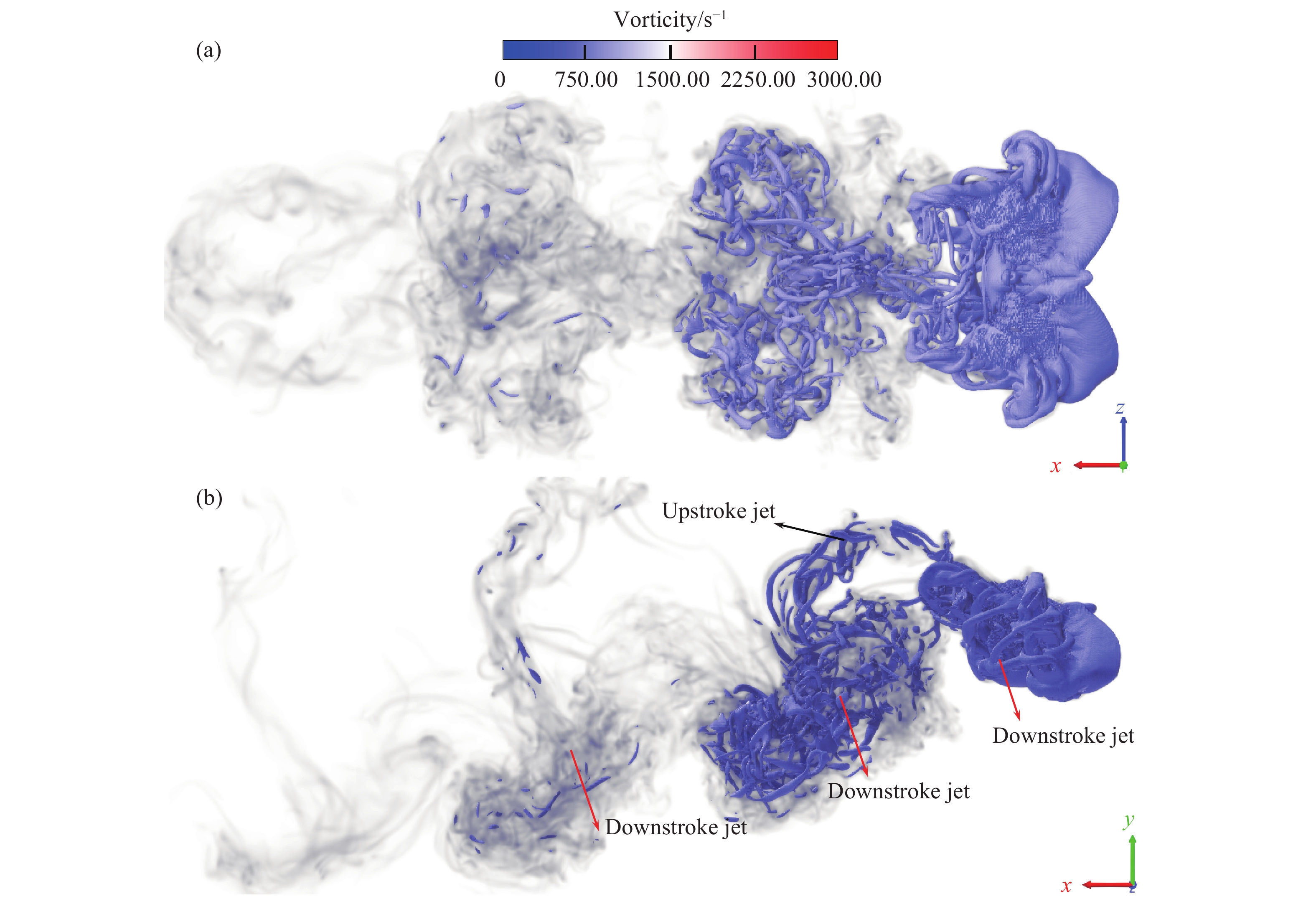
Fuchiwaki等[29]利用二维粒子图像速度场测量方法(Particle image velocimetry, PIV)对多种蝴蝶(包括赤蛱蝶和大帛斑蝶)飞行的流场进行可视化观测研究,指出无论什么种类的蝴蝶,在下扑至底部最低位置的过程中,其翼上方都会形成一个涡环,但涡环的规模对于不同蝴蝶有所不同. 他们通过多维PIV技术研究活体蝴蝶自由飞行的气动特性[3,30],以确定翅膀附近的三维涡旋结构,如图4所示.
![]()
北京航空航天大学的孙茂[4]指出蝴蝶在飞行过程中翼相对身体仅有上拍和下拍动作,没有类似蜜蜂、长喙天蛾等飞行昆虫显著的翼翻转动作. 蝴蝶身体存在较为明显的俯仰震荡,翼在身体的带动下产生周期性的俯仰. 北京航空航天大学的黄华等[31]推导了蝴蝶扑翼模型,通过求解纳维–斯托克斯(Navier–Stokes, N–S)方程数值方法定量研究了蝴蝶前飞的空气动力学特性,并对蝴蝶飞行流场涡结构进行了详细的分析. 北京航空航天大学的张益鑫等[23]根据高速相机记录的蝴蝶飞行运动学参数实施了基于Adams和Xflow的蝴蝶前飞计算流体力学(Computational fluid dynamics, CFD)高保真联合仿真,实验结果给出了前飞蝴蝶周围流场结构并分析了影响蝴蝶前飞气动力的关键运动学参数,如图5所示.
![]()
传统的昆虫扑翼飞行模型,如相对较小的昆虫如蜜蜂和果蝇等,由于其扑翼频率和身体动力学在时间尺度上存在巨大差异,一般假设身体为姿态时不变的刚体,仅翅膀扑打[32]. 而蝴蝶胸部的姿态在飞行过程中不断地变化,腹部相对于胸部发生摆动. 因此,大多数研究中推导的昆虫飞行动力学方程和控制方案不适用于蝴蝶飞行的研究. 对蝴蝶飞行机理的解释,其最大的难点在于对这种低频扑翼动作和身体运动的高度耦合进行动力学建模.
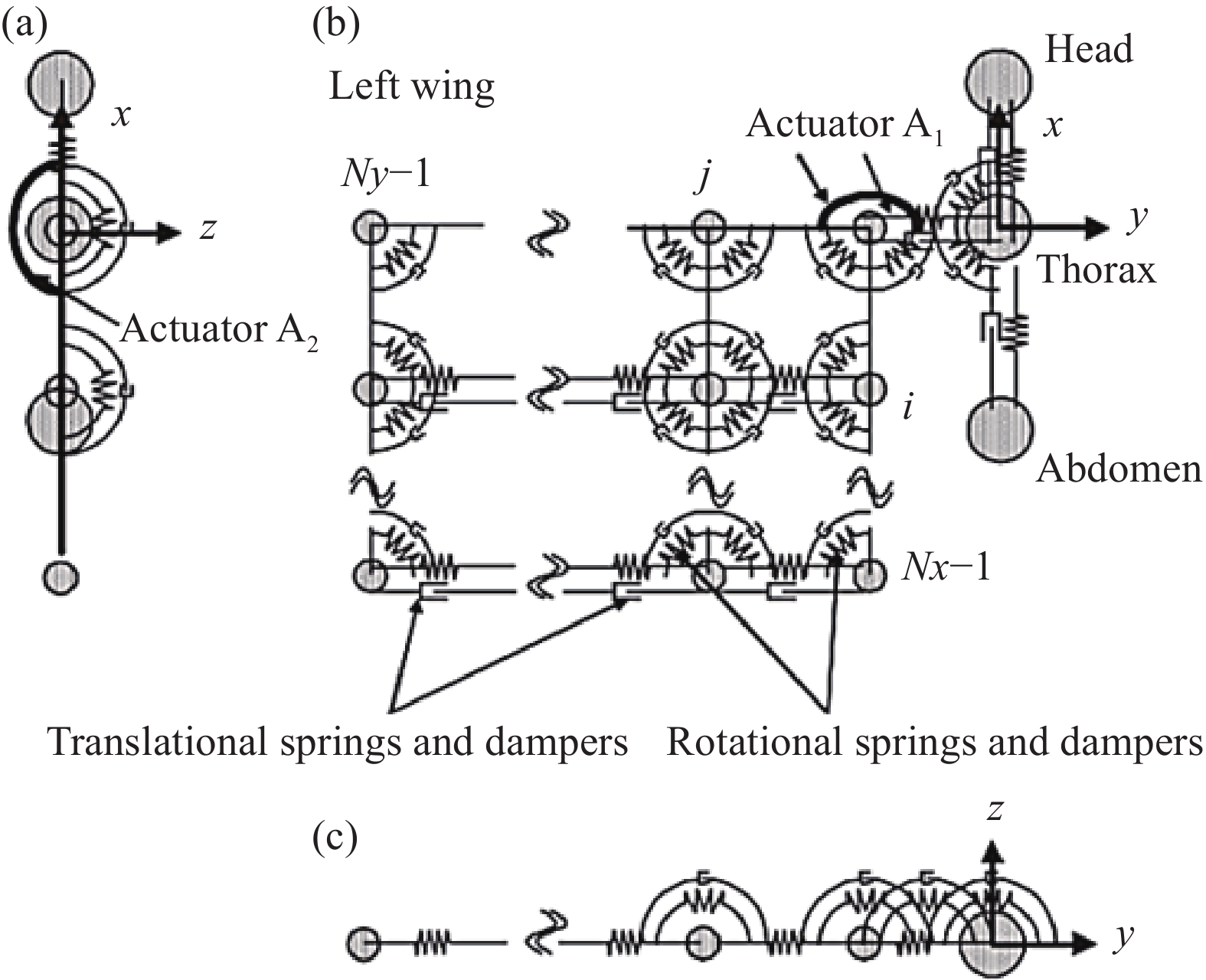
Jayakumar等[6]根据活体蝴蝶建立了二维多刚体蝴蝶模型,如图6所示. 他们将翼、胸部和腹部简化为三个厚度不计的刚性板,将前后翼简化为一个整翼,利用欧拉–拉格朗日运动方程描述蝴蝶动力学模型,从数值上理解腹部运动在蝴蝶扑翼飞行俯仰稳定性中的作用,以及胸部俯仰在周期性扑翼飞行中的不稳定性. 他们设计了不受控飞行和受控飞行两种仿真实验. 在受控飞行中发现,腹部运动足以抵消胸部俯仰的不稳定性,还可以维持扑翼飞行,并且对于人工胸部扭矩扰动的恢复时间很短. 因此,这些观察表明腹部用于短周期控制,而翼用于长周期控制以稳定蝴蝶飞行的俯仰. Senda等[7]为分析自由飞行蝴蝶的稳定性等问题,用拉格朗日法建立四刚体的蝴蝶模型,如图6所示,利用空气动力学的面元法解算蝴蝶飞行的气动模型. 其所建立的数值模拟模型和得到的周期轨迹表明,蝴蝶可以稳定飞行,并且尾迹中的自由涡旋具有一定的稳定作用. Fujikawa和Hirakawa[22]则通过三维高速摄像系统捕捉了柑桔凤蝶(Papilio xuthus)的起飞运动,得到蝴蝶的三种特征角度:扑打角、胸部俯仰角和腹部摆动角的相位关系,在此基础上建立了一个包括腹部、翼变形的等距计算模型. 其中,身体由头部、胸部和腹部三个质点组成,由弹簧和阻尼器连接,如图7所示. 提出了一种新的基于弱耦合方法的有限单元计算框架来分析身体的运动和它周围的流场,得到了蝴蝶起飞过程中翼周围流场涡结构.
![]()
![]()
综上所述,虽然不同的建模方法和数值仿真手段被应用于蝴蝶扑翼飞行研究,但都是在对实际蝴蝶生物形态或飞行规律简化的基础上进行的,其翼–身耦合的特征和各部分内在的驱动关系并没有被完全体现出来,需要有能够描述蝴蝶身体各个部位配合运动且最终实现可控飞行的模型来进一步阐明蝴蝶扑翼飞行机理.
2. 扑翼飞行样机研制及操纵控制方法
仿生扑翼飞行器(Bionic flapping-wing air vehicle,BFWAV)是一种基于仿生学原理设计的模仿飞行生物的特种飞行器. 目前,已有的仿生学研究成果表明在同等尺寸的情况下,扑翼飞行器的灵活性和能量利用效率要高于一般的固定翼和旋翼飞行器,最具代表性的是Aerovironment公司的“蜂鸟”[33]、哈佛大学的“RoboBee”[34]、代尔夫特的“DelFly II”[35]和其最新的X型翼无尾扑翼飞行器[36]. BFWAV将推进功能和姿态控制集成于一套扑动系统中,具有较高的飞行机动性和悬停能力. 在较小尺度下具备更高的气动效率,可以以较低的能量进行长距离飞行,更适于长时间无能源补充情况及复杂环境下执行任务. 而且,BFWAV通常还具有尺度小、便于携带、隐蔽性高等优势,具有广泛的应用前景.
迄今为止,虽然许多研究人员都在尝试开发不同尺度、具有各种执行机构和任务载荷的仿生微型飞行器,但他们的研究还没有得到真正意义上的实际应用. 其中一个重要的原因是鸟类和昆虫的飞行机理还没有被充分揭示,蝴蝶的飞行机制相对于其他昆虫较特殊,其飞行行为和气动特性更为复杂,这使得研制仿蝴蝶扑翼飞行器的工作更加困难.
2.1 真实蝴蝶尺度的微型扑翼飞行器
近20年来,一些日本学者在对自然蝴蝶扑翼飞行观测和飞行力学实验的基础上,尝试了多种真实蝴蝶尺度下仿蝴蝶飞行器的研制. Imura和Tanaka等[5,20,37]对自然蝴蝶自由飞行及身体固定状态下的扑翼进行观测,研究了蝴蝶翼在飞行中的动态行为,研制了多种蝴蝶型扑翼机(Butterfly-type ornithopter, BTO)来模拟蝴蝶翼的扑打运动,并阐明了翼变形及翼脉存在对飞行性能的积极影响. Fujikawa等[21−22]对真实蝴蝶尺度下小型扑翼飞行器进行了持续的研究和迭代,基于曲柄摇杆急回机构设计了电机驱动的微型仿蝴蝶扑翼飞行器,可作为危险环境下的观测系统.
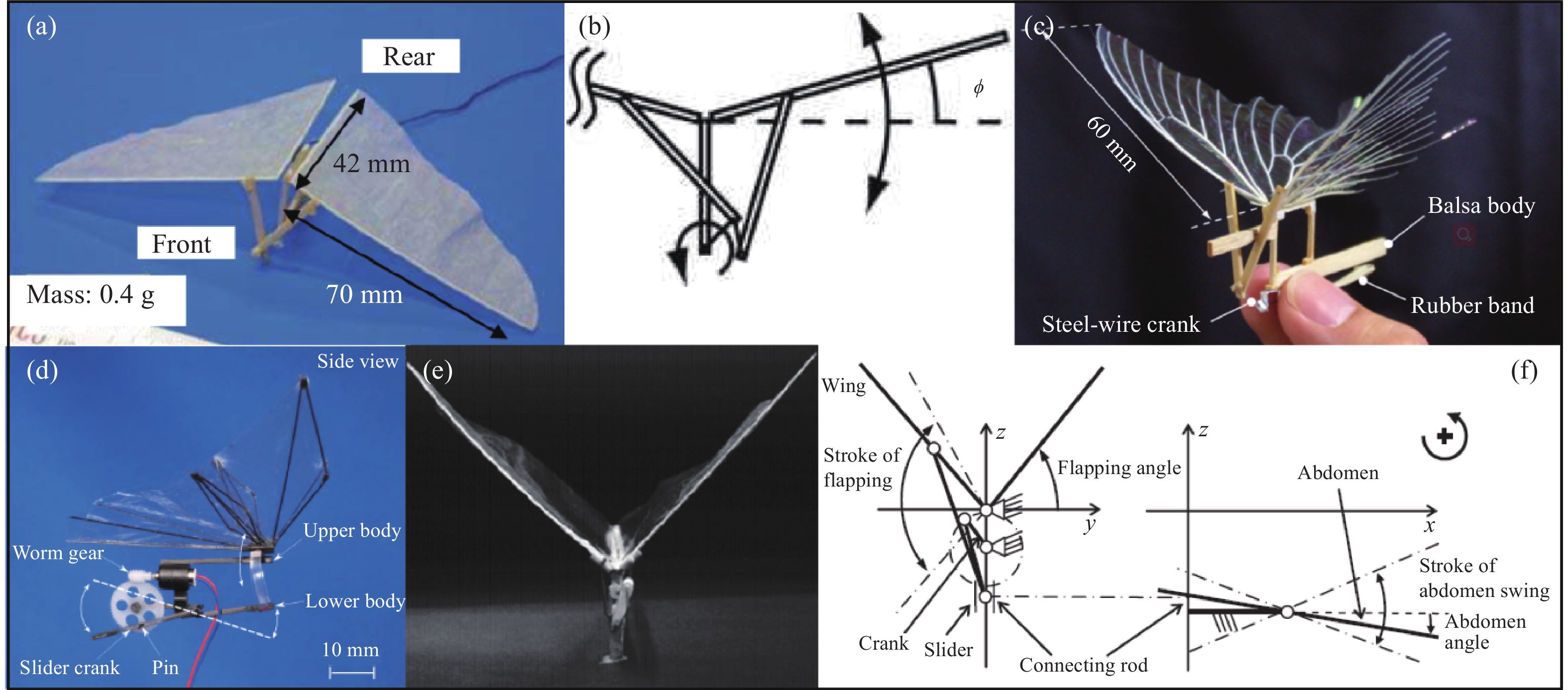
具体来说,Tanaka等对真实蝴蝶尺度下小型扑翼飞行器进行了持续的研究和迭代,研发了简易的木质蝴蝶型扑翼机,利用制作的扑翼机实验研究蝴蝶扑翼飞行机理,如图8(a)所示. 2005年,他们开发了一种质量为0.4 g,翼展为140 mm,扑翼频率为10 Hz的无主动控制的轻型BTO[37],双翼由弹性储能器件驱动的简易曲柄机构驱动,仅能完成短暂的不受控飞行. 2009年,他们制作了另一种翼展更大的无主动控制的BTO[5],整机重1.9 g,设置布局为双翼无尾翼,翼展和弦长分别为240 mm和80 mm,翼载荷为1.5 N·m–2,翼扑打结构则采用电机驱动曲柄机构. 与之前的BTO结构类似,其样机扑翼频率也约为10 Hz,但受限于电池的容量,其稳定飞行的时间有限. 最终样机完成不受控自由飞行,实验证明机翼适当的弹性变形对实现稳定飞行性能的重要性. 2010年,他们研制了一种模仿燕尾蝶翼运动和翼形状的扑翼机[20],如图8(c)所示. 整机仅重0.39 g,扑打频率为10 Hz,参数均与自然蝴蝶相似. 实验表明,机翼弹性变形是实现稳定飞行性能的重要参数之一,而变形程度由翅脉直接决定,因此翼内翅脉能够对飞行性能产生影响. 2017年Fujikawa和Kikuchi[21]发布了最新的电机驱动微型仿蝴蝶扑翼飞行器,如图8(d)所示. 设计飞行器不同的上下扑打时间,使用姿态控制方式将下扑和上扑的时间比设定为0.67、1和1.5,最终其飞行轨迹呈阶梯状. 他们还研发了一种具有急回特性的可以模拟扑打运动的巧妙机构,并通过运动分析和数值模拟验证了它的有效性. 结果表明,这种曲柄摇杆急回机构对于需要简化以实现最小有效载荷飞行的扑翼机器人是有用的,但该样机的飞行仍然是不受控的. Fujikawa和Hirakawa[22]为了研究蝴蝶起飞的特性,研制了一款翼展为120 mm,质量为0.72 g,扑打频率可变的微型电动蝴蝶,如图8(e)和图8(f)所示. 研究发现蝴蝶在下扑时腹部向上运动,在上扑时腹部向下运动,扑动和腹部角度改变频率相同,但处于反相位. 所构建的微型扑翼样机实现类似蝴蝶的腹部上下摆动,但并未将其用于姿态控制,表现为扑翼的随动运动,同时实际硬件机构设计导致机体质心与实际蝴蝶不匹配.
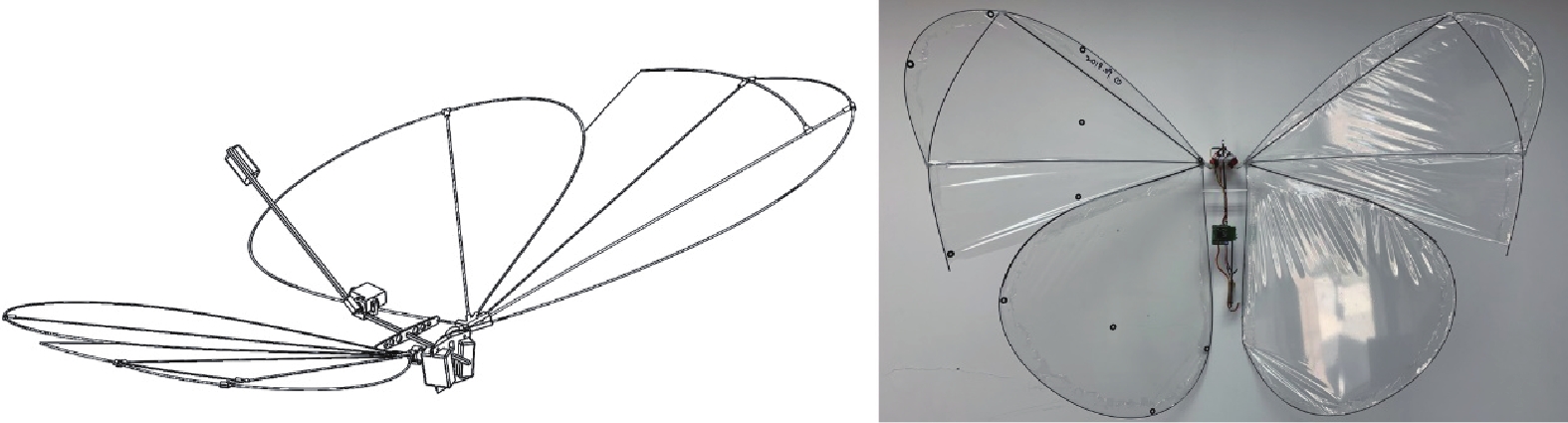
![]() 图 8 目前已有的昆虫尺度仿蝴蝶扑翼样机和驱动结构. (a) 可实现简单扑翼运动的蝴蝶型扑翼机样机(BTO)[37]; (b) BTO曲柄连杆结构示意图[37]; (c) 仿燕尾蝶的无尾扑翼样机[20]; (d) 具有曲柄摇杆急回机构的单电机驱动微型仿蝴蝶扑翼机[21]; (e) 单动力源扑翼机构[22]; (f) 微型电动蝴蝶的腹部摆角控制机构[22,31]Figure 8. Existing prototypes and driving structures of an insect-scale butterfly-inspired flapping-wing ornithopter: (a) photograph of a butterfly-type ornithopter (BTO)[37]; (b) crank and linkages of a BTO[37]; (c) tailless ornithopter mimicking a swallowtail butterfly with the crank mechanism[20]; (d) manufactured flapping robot without a battery[21]; (e) small butterfly-style flapping robot[22]; (f) flapping mechanism of the wing and abdomen swinging mechanism for a small butterfly-style robot[22,31]
图 8 目前已有的昆虫尺度仿蝴蝶扑翼样机和驱动结构. (a) 可实现简单扑翼运动的蝴蝶型扑翼机样机(BTO)[37]; (b) BTO曲柄连杆结构示意图[37]; (c) 仿燕尾蝶的无尾扑翼样机[20]; (d) 具有曲柄摇杆急回机构的单电机驱动微型仿蝴蝶扑翼机[21]; (e) 单动力源扑翼机构[22]; (f) 微型电动蝴蝶的腹部摆角控制机构[22,31]Figure 8. Existing prototypes and driving structures of an insect-scale butterfly-inspired flapping-wing ornithopter: (a) photograph of a butterfly-type ornithopter (BTO)[37]; (b) crank and linkages of a BTO[37]; (c) tailless ornithopter mimicking a swallowtail butterfly with the crank mechanism[20]; (d) manufactured flapping robot without a battery[21]; (e) small butterfly-style flapping robot[22]; (f) flapping mechanism of the wing and abdomen swinging mechanism for a small butterfly-style robot[22,31]2.2 电驱动仿蝴蝶扑翼飞行器
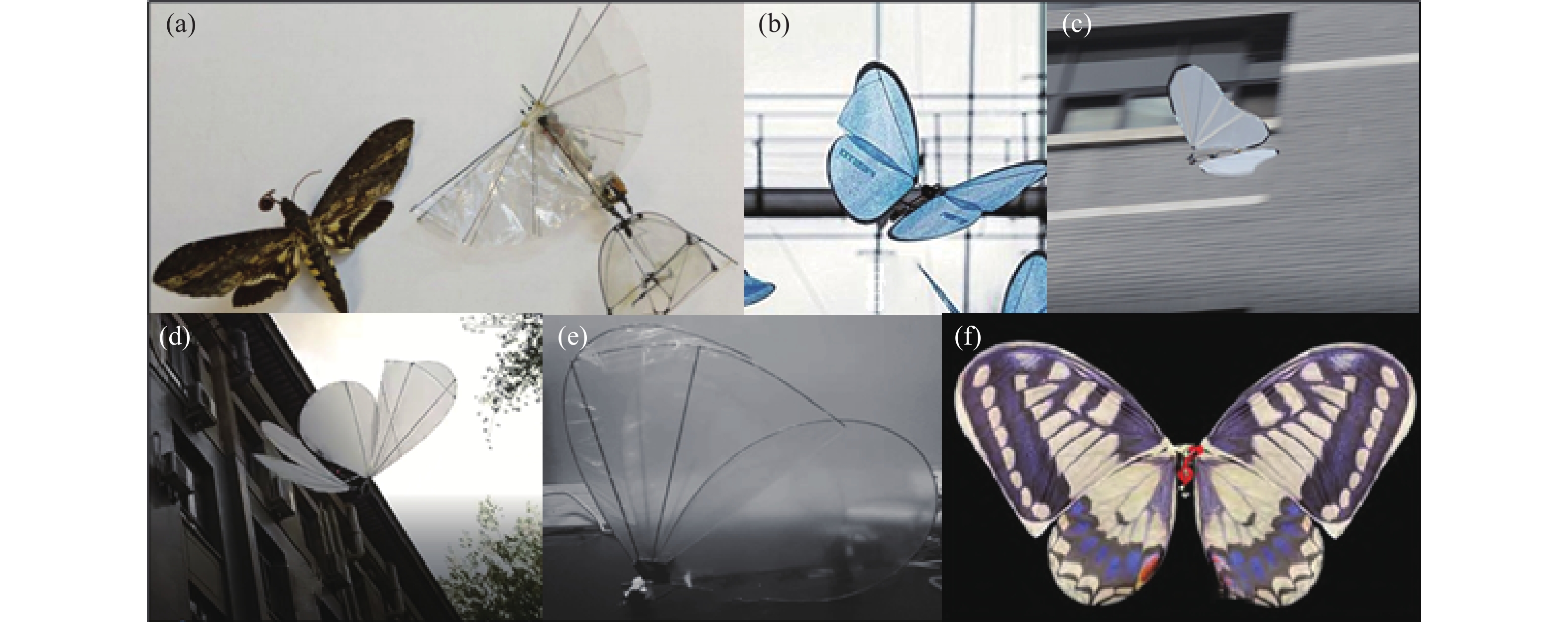
2010年之后,随着精密加工制造和微机电技术(Micro-electro-mechanical system,MEMS)的发展,可受控飞行的仿蝴蝶扑翼飞行器被研制出来,如图9所示.
![]() 图 9 目前已有的仿蝴蝶扑翼样机. (a)以色列机械蝴蝶样机[38];(b)德国Festo公司eMotionButterfly[39];(c)北航连翅仿生蝴蝶扑翼飞行器[36,40];(d) 北航新型高机动仿蝴蝶扑翼飞行器RoboButterfly-I[9,41−42];(e) 上海交大仿蝴蝶飞行器[43];(f) 北科大线驱动转向仿蝴蝶扑翼飞行机器人USTButterfly-S[44]Figure 9. Existing prototypes of a butterfly-inspired flapping-wing air vehicle: (a) mechanical butterfly from Israel[38]; (b) eMotionButterfly from Festo[39]; (c) butterfly-inspired flapping-wing air vehicle with an integrated forewing and hindwing from Beihang University[36,40]; (d) RoboButterfly-I from Beihang University[9,41−42]; (e) butterfly-like flapping-wing aircraft from Shanghai Jiao Tong University[43]; (f) USTButterfly-S from the University of Science and Technology Beijing[44]
图 9 目前已有的仿蝴蝶扑翼样机. (a)以色列机械蝴蝶样机[38];(b)德国Festo公司eMotionButterfly[39];(c)北航连翅仿生蝴蝶扑翼飞行器[36,40];(d) 北航新型高机动仿蝴蝶扑翼飞行器RoboButterfly-I[9,41−42];(e) 上海交大仿蝴蝶飞行器[43];(f) 北科大线驱动转向仿蝴蝶扑翼飞行机器人USTButterfly-S[44]Figure 9. Existing prototypes of a butterfly-inspired flapping-wing air vehicle: (a) mechanical butterfly from Israel[38]; (b) eMotionButterfly from Festo[39]; (c) butterfly-inspired flapping-wing air vehicle with an integrated forewing and hindwing from Beihang University[36,40]; (d) RoboButterfly-I from Beihang University[9,41−42]; (e) butterfly-like flapping-wing aircraft from Shanghai Jiao Tong University[43]; (f) USTButterfly-S from the University of Science and Technology Beijing[44]2012年以色列航空工业公司微型机器人实验室研制的新型机器昆虫“机械蝴蝶”[38],翼展为20 cm,重12 g,集成动力、传感器、通讯及舵面系统,可模拟蝴蝶上下扑翼. 该机械蝴蝶采用交叉双翼的结构,虽然能够产生升力,但与真实蝴蝶形态及飞行特征相差甚远,严格意义上不能算作仿生蝴蝶扑翼飞行器. 2015年,德国Festo公司研制的eMotionButterfly采用双翼独立驱动模式,翼根和每个电机相连,在翼根上固定有前翅和后翅,系统结构高度集成化,整机质量约为38 g. 可实现平飞、爬升和转弯飞行,飞行性能较为优异[39]. 虽然eMotionButterfly实现了可控飞行,但由于其没有考虑蝴蝶腹部摆动的作用,飞行过程中身体躯干的俯仰角度较小,可以认为是大翼扑打导致的被动俯仰.
早在2016年,北京航空航天大学的王少萍等以凤蝶为仿生原型,率先设计并研制了多种仿蝴蝶扑翼飞行器,包括前后翼一体设计的新型连翅仿生蝴蝶扑翼飞行器[40,45]和前后翼分开设计的双翼独立驱动的新型仿生蝴蝶飞行器RoboButterfly-I[9,41−42],后者为国内首款实现可控飞行的仿蝴蝶扑翼飞行器. 两种样机均通过伺服舵机直接驱动来实现翼扑打,设计了基于nano17的动力学实验系统,完成了扑翼飞行器在零来流和非零来流条件下的动力学特性测试,在Vicon动捕系统中完成了前飞和横侧向可控自由飞行运动学实验;研制了不到3 g的机载电子系统和完备的遥操作控制系统,实现了样机手掷及弹射装置起飞;设计了带姿态闭环的PD控制器,验证了左右翼独立驱动下仿蝴蝶扑翼飞行器飞行的稳定性及机动性. 2019年起,他们又结合对大帛斑蝶(Idea leuconoe)、红锯蛱蝶(Cethosia biblis)自由飞的双高速摄像机三维运动学观测结果,提出了具有主动摆动腹部的新型仿蝴蝶扑翼飞行器RoboButterfly-II,引入非对称余弦拍打控制规律并结合仿生中枢模式发生器(CPG)对作动器实施了稳定精确的节律脉冲信号控制,最终实现了样机的纵向可控飞行,这是一种针对仿蝴蝶飞行器无尾高机动飞行控制的仿生新设计[46],如图10所示. 2019年之后,上海交通大学和北京科技大学的研究团队陆续开展了仿蝴蝶的扑翼飞行器的研制[43−44]. 前者的样机虽采用双舵机独立驱动,但未实现飞行. 后者的USTButterfly-S样机采用单电机减速器并结合曲柄摇杆结构,虽然实现了有效飞行,但是单驱动形式更接近常规仿鸟扑翼的驱动形式,需要额外增加作动结构来实现可控飞行. 两者都未对扑翼飞行器的气动特性进行定量分析,未见有关样机大机动飞行和增稳控制的研究.
![]()
以上对于仿蝴蝶扑翼的研究虽然都研制了相应的仿生蝴蝶扑翼飞行器,但是受限于电驱动作动器的功率密度、重量和尺寸,为了获得足够的升力几乎所有样机都做了相应的放大设计,扑翼频率也因为飞行器特征尺寸的增大而降低,这使得该类飞行器的抗风能力较差. 蝴蝶扑翼本身就为多自由度运动,同时,大多数都对蝴蝶扑翼及翼–身耦合的机理进行了简化,研究是在对其飞行模型充分简化的基础上进行的,而实际蝴蝶的飞行机理要复杂得多,这种低频、大幅度的扑翼运动和腹部摆动的共同作用对其飞行至关重要. 对于蝴蝶复杂的前翼动作需要有更精密、更轻的机构来实现,而腹部对于身体俯仰控制的影响不可忽略,在很多大机动动作过程中,腹部主动摆动将产生额外的姿态控制力矩输入. 另外,对于仿蝴蝶扑翼飞行器主动控制的研究目前基本为空白,除少数学者对该类飞行器进行了简单的建模和数值计算仿真之外[12−13],都进行了样机自由飞行实验,需要研制能够感知并反馈自身姿态的微型机载飞行控制系统,不断地完善飞行器纵向、横向控制算法的研究和增稳控制器的设计,以此来达到稳定可控的飞行状态. 目前世界各地研究团队研制的电驱动仿蝴蝶扑翼飞行器样机物理参数,如表1所示,实现可控飞行的样机多采用双翼舵机直驱的方式,飞行速度在1到2.5 m·s–1之间,翼扑打频率在1到5 Hz之间,极限续航时间不超过5 min.
表 1 目前电驱动仿蝴蝶扑翼飞行器样机物理参数表Table 1. Physical parameters of existing electric drive butterfly-inspired flapping-wing air vehicle prototypesPrototype Time Overall weight/g Wingspan/cm Number of wings Drive mode Endurance/
minFlapping frequency/
HzControlled flight Flight speed/
(m·s−1)Research institute eMotionButterflies 2015 32 50 4 Servo drive directly 3–4 1–2 Yes 1–2.5 Festo, Germany Butterfly-inspired flapping-wing aero vehicle[40,45] 2016 38.6 64.8 2 Servo drive directly 1 2 No 1.5 Beihang University RoboButterfly-I[9,41−42] 2016 39.6 62 4 Servo drive directly 5 1.8–3.2 Yes 1.5 Beihang University Bionic butterfly aircraft[43] 2018 32.2 49.8 4 Servo drive directly — 1 No — Shanghai Jiao
Tong UniversityRoboButterfly-II[46] 2020 45.8 63 4 Servo drive directly 4 2~3.9 Yes 1.4 Beihang University USTButterfly-S[44] 2021 50 50 4 Single motor drives the crank rocker 5 1~5 No — University of
Science and
Technology Beijing3. 发展趋势与未来展望
未来,基于多高速相机和三维PIV技术对蝴蝶飞行的精确三维运动学及流场观测将进一步揭示蝴蝶独特的飞行机理,高保真、高精度的流固耦合CFD仿真方法将应用于蝴蝶飞行空气动力学仿真和流场显示. 由翅脉和被鳞的膜翼组成的柔性翼产生的形变对蝴蝶气动特性的深层次影响,以及蝴蝶翼–身耦合运动与飞行性能、飞行稳定性的关系等,都将被进一步验证阐明. 更加清晰的蝴蝶飞行机理研究也将指导仿蝴蝶扑翼飞行器的研制和优化. 到目前为止市面上大部分扑翼飞行器的飞行操控和机动控制都是通过尾翼间接操纵来实现的,这种方法适用于高频膜翼扑翼系统. 对于无尾、无舵面的动力扑翼直接操控飞行姿态的研究较少,蝴蝶翼的扇动是多自由度的,可以实现无尾直接飞行姿态控制,目前传统的微机电系统难以达到此效果. 同时,由于仿蝴蝶的低频扑翼飞行,翼面积大且其惯性力不可忽略,这样会产生较为显著的机身振荡,在这种翼–身运动的强耦合前提下实现类似生物的大机动控制和长周期稳定飞行非常具有挑战性. 因此,仿蝴蝶扑翼飞行器在整机昆虫尺度轻量化设计、高功率密度新材料作动器设计、双翼独立多自由度主动挥拍控制、无尾操纵增稳控制系统以及引入腹部主动摆动干预的飞行控制等方向具有较大的发展潜力. 以上工作的推进将进一步缩小仿蝴蝶扑翼飞行器与其实际应用存在的差距.
未来仿生蝴蝶扑翼飞行器的发展趋势:
(1)飞行器翼展将进一步缩小,接近或达到昆虫尺度. 气动布局为翼前掠且展弦比较小,单侧翼由前翼和后翼组成,前后翼被驱动机构带动大幅度拍打的同时,可主动分离产生多自由度的相对运动,实现前掠角、翼面积和前后翼上下间隙的主动快速调节,具备更贴近自然蝴蝶的生物形态设计,在一定程度上复现复杂的翼运动,进而实现无尾姿态控制;
(2)飞行器翼扑打频率和幅值进一步提高,飞行速度和机动性进一步提高. 微型的大扭矩输出机电作动器或新型仿生物肌肉作动器将被研制,翼扇动的动力学特性进一步提升,具备接近甚至达到生物作动水平的力学表现. 同时,仿照自然蝴蝶的运动学特征设计,结合主动摆动腹部结构增加了仿蝴蝶扑翼飞行器欠驱动系统的控制调节输入量,翼–身协同运动控制有望提升飞行稳定性和机动性;
(3)飞行器各部分质量百分比将更接近自然蝴蝶. 扑翼飞行器的各部分质量属性和质心位置与其飞行表现息息相关,对于蝴蝶而言,较大的翼面积在扇动过程中产生较大的气动力矩会诱导整机的波动和胸部的被动俯仰,质量占比较大的腹部输出主动摆动运动将对整体质心和气动焦点的相对位置关系产生影响,从某种意义上来说这样的设计会提高蝴蝶飞行性能;
(4)飞行器前后翼刚度分布进一步优化,在展向和弦向的柔性形变更接近真实蝴蝶. 翼在气动力作用下展向会产生弯曲变形,弦向会产生扭转变形,研究表明一定程度的柔性变形对于蝴蝶飞行过程中升推力产生的气动特性产生积极影响. 结合新型高分子薄膜材料及复合材料加工工艺,对膜翼结构的仿生优化设计将提高气动效率.
4. 结论
综上所述,目前蝴蝶扑翼飞行的机理和仿蝴蝶扑翼飞行器的研制得到了国内外研究人员的广泛关注. 大量的研究证实了蝴蝶独特的飞行行为及动力学特性:蝴蝶身体和翼存在同频的大幅度波动运动,两者的耦合关系显著;蝴蝶的前翼和后翼在前飞过程中基本不发生分离,几乎为一个整体,且翼的扭转运动不明显;蝴蝶在一些大机动飞行状态(如起飞、倒飞和快速爬升等)下,前后翼会产生多自由度的相对运动甚至上下分离的现象;蝴蝶前翼存在前掠–后掠运动,下扑时向前掠,上扑时向后掠;由于蝴蝶翼展一般较大,翼面积也较大,飞行过程中其翼面柔性变形是显著的. 蝴蝶的扑翼飞行与众不同且具有更高的载荷能力,然而目前的微机电系统技术、空气动力学和精密加工技术的发展还不足以支持实际昆虫尺度扑翼飞行器的研制. 因此,研究人员从仿生学的角度出发,在对蝴蝶自由飞行观测的基础上结合实验及数值分析方法对蝴蝶扑翼飞行机理进行研究,根据流体力学相似原理,适当增大尺度并降低扑翼频率,在工程上模拟蝴蝶特殊的飞行运动机制,设计并研发出小展弦比、超低频扑打的仿生蝴蝶扑翼飞行器. 虽然目前已有样机实现遥控飞行,但与实际蝴蝶的飞行行为及飞行能力相比仍然存在较大差距,受限于能源供给,几乎所有样机的续航能力一般较差. 同时,相比大展弦比的仿鸟类或仿其他昆虫的扑翼飞行器,蝴蝶的扑翼运动和无尾姿控更加复杂,其翼–身协同的独特机动飞行控制模式需要进一步深入研究. 因此,实现仿生蝴蝶扑翼飞行器的长时间、可控、敏捷飞行具有挑战性. 仿蝴蝶扑翼飞行器相对传统固定翼和旋翼飞行器,具有低速不失速、飞行噪声低、隐蔽性高等诸多优势,未来仿蝴蝶扑翼飞行器在军民用领域应用前景广阔,如何将其有效地应用于野外勘测、救灾、军事侦查等场景也是值得思考的问题.
-
![]()
![]()
图 2 蝴蝶双翼在飞行中的三种动态行为. (a) 扑打运动;(b) 前掠–后掠运动;(c) 扭转运动
Figure 2. Three dynamic behaviors of butterfly wings in free flight: (a) flapping motion; (b) lead–lag motion; (c) feathering motion
![]()
![]()
![]()
![]()
![]()
![]()
图 8 目前已有的昆虫尺度仿蝴蝶扑翼样机和驱动结构. (a) 可实现简单扑翼运动的蝴蝶型扑翼机样机(BTO)[37]; (b) BTO曲柄连杆结构示意图[37]; (c) 仿燕尾蝶的无尾扑翼样机[20]; (d) 具有曲柄摇杆急回机构的单电机驱动微型仿蝴蝶扑翼机[21]; (e) 单动力源扑翼机构[22]; (f) 微型电动蝴蝶的腹部摆角控制机构[22,31]
Figure 8. Existing prototypes and driving structures of an insect-scale butterfly-inspired flapping-wing ornithopter: (a) photograph of a butterfly-type ornithopter (BTO)[37]; (b) crank and linkages of a BTO[37]; (c) tailless ornithopter mimicking a swallowtail butterfly with the crank mechanism[20]; (d) manufactured flapping robot without a battery[21]; (e) small butterfly-style flapping robot[22]; (f) flapping mechanism of the wing and abdomen swinging mechanism for a small butterfly-style robot[22,31]
![]()
图 9 目前已有的仿蝴蝶扑翼样机. (a)以色列机械蝴蝶样机[38];(b)德国Festo公司eMotionButterfly[39];(c)北航连翅仿生蝴蝶扑翼飞行器[36,40];(d) 北航新型高机动仿蝴蝶扑翼飞行器RoboButterfly-I[9,41−42];(e) 上海交大仿蝴蝶飞行器[43];(f) 北科大线驱动转向仿蝴蝶扑翼飞行机器人USTButterfly-S[44]
Figure 9. Existing prototypes of a butterfly-inspired flapping-wing air vehicle: (a) mechanical butterfly from Israel[38]; (b) eMotionButterfly from Festo[39]; (c) butterfly-inspired flapping-wing air vehicle with an integrated forewing and hindwing from Beihang University[36,40]; (d) RoboButterfly-I from Beihang University[9,41−42]; (e) butterfly-like flapping-wing aircraft from Shanghai Jiao Tong University[43]; (f) USTButterfly-S from the University of Science and Technology Beijing[44]
![]()
表 1 目前电驱动仿蝴蝶扑翼飞行器样机物理参数表
Table 1 Physical parameters of existing electric drive butterfly-inspired flapping-wing air vehicle prototypes
Prototype Time Overall weight/g Wingspan/cm Number of wings Drive mode Endurance/
minFlapping frequency/
HzControlled flight Flight speed/
(m·s−1)Research institute eMotionButterflies 2015 32 50 4 Servo drive directly 3–4 1–2 Yes 1–2.5 Festo, Germany Butterfly-inspired flapping-wing aero vehicle[40,45] 2016 38.6 64.8 2 Servo drive directly 1 2 No 1.5 Beihang University RoboButterfly-I[9,41−42] 2016 39.6 62 4 Servo drive directly 5 1.8–3.2 Yes 1.5 Beihang University Bionic butterfly aircraft[43] 2018 32.2 49.8 4 Servo drive directly — 1 No — Shanghai Jiao
Tong UniversityRoboButterfly-II[46] 2020 45.8 63 4 Servo drive directly 4 2~3.9 Yes 1.4 Beihang University USTButterfly-S[44] 2021 50 50 4 Single motor drives the crank rocker 5 1~5 No — University of
Science and
Technology Beijing 下载: 导出CSV
下载: 导出CSV
-
[1] Sun M, Wang J K, Xiong Y. Dynamic flight stability of hovering insects. Acta Mech Sin, 2007, 23(3): 231 doi: 10.1007/s10409-007-0068-3
[2] Kuroki T, Fuchiwaki M, Tanaka K, et al. Characteristics of dynamic forces generated by a flapping butterfly // Proceedings of ASME 2013 Fluids Engineering Division Summer Meeting. Nevada, 2013: V01AT04A003
[3] Fuchiwaki M, Kuroki T, Tanaka K, et al. Three-dimensional vortex structure around a free flight butterfly // Fluids Engineering Division Summer Meeting. Illinois, 2014: V01AT04A002
[4] 孙茂. 昆虫飞行的空气动力学. 力学进展, 2015, 45(1):1 doi: 10.6052/1000-0992-14-065 Sun M. Aerodynamics of insect flight. Adv Mech, 2015, 45(1): 1 doi: 10.6052/1000-0992-14-065
[5] Imura T, Fuchiwaki M, Tanaka K. Dynamic behaviors of butterfly wing and their application to micro flight robot // Proceedings of ASME 2009 Fluids Engineering Division Summer Meeting. Vail, 2010: 1687
[6] Jayakumar J, Senda K, Yokoyama N. Control of pitch attitude by abdomen during forward flight of two-dimensional butterfly. J Aircr, 2018, 55(6): 2327 doi: 10.2514/1.C034767
[7] Senda K, Obara T, Kitamura M, et al. Modeling and emergence of flapping flight of butterfly based on experimental measurements. Robot Auton Syst, 2012, 60(5): 670 doi: 10.1016/j.robot.2011.12.007
[8] Senda K, Obara T, Kitamura M, et al. Effects of structural flexibility of wings in flapping flight of butterfly. Bioinspir Biomim, 2012, 7(2): 025002 doi: 10.1088/1748-3182/7/2/025002
[9] 张益鑫, 王兴坚, 王少萍, 等. 基于特征运动观测的蝴蝶前飞规律及样机验证. 北京航空航天大学学报, 2023, 49(7):1651 Zhang Y X, Wang X J, Wang S P, et al. Mechanism of butterfly forward flight and prototype verification based on characteristic motion observation. J Beijing Univ Aeronaut Astronaut, 2023, 49(7): 1651
[10] Ellington C P. The aerodynamics of hovering insect flight. I. The quasi-steady analysis. Phil Trans R Soc Lond B, 1984, 305(1122): 1 doi: 10.1098/rstb.1984.0049
[11] Betts C R, Wootton R J. Wing shape and flight behaviour in butterflies (lepidoptera: Papilionoidea and hesperioidea): A preliminary analysis. J Exp Biol, 1988, 138(1): 271 doi: 10.1242/jeb.138.1.271
[12] Brodsky A K. Vortex formation in the tethered flight of the peacock butterfly Inachis IO L.(lepidoptera, Nymphalidae) and some aspects of insect flight evolution. J Exp Biol, 1991, 161(1): 77
[13] Dudley R. Biomechanics of flight in neotropical butterflies: Aerodynamics and mechanical power requirements. J Exp Biol, 1991, 159(1): 335 doi: 10.1242/jeb.159.1.335
[14] Ellington C P. The novel aerodynamics of insect flight: applications to micro-air vehicles. J Exp Biol, 1999, 202(23): 3439 doi: 10.1242/jeb.202.23.3439
[15] Ellington C P. The aerodynamics of hovering insect flight. II. Morphological parameters. Phil Trans R Soc Lond B, 1984, 305(1122): 17
[16] Dudley R. Biomechanics of flight in neotropical butterflies: Morphometries and kinematics. J Exp Biol, 1990, 150(1): 37 doi: 10.1242/jeb.150.1.37
[17] Brackenbury J H. Kinematics of take-off and climbing flight in butterflies. J Zool, 1991, 224(2): 251 doi: 10.1111/j.1469-7998.1991.tb04803.x
[18] Cranford J, Slegers N, Landrum B. Experimental characterization of butterfly in climbing flight // AIAA Modeling and Simulation Technologies Conference. Dallas, 2015: 2328
[19] Kang C K, Cranford J, Sridhar M K, et al. Experimental characterization of a butterfly in climbing flight. AIAA J, 2017, 56(1): 15
[20] Tanaka H, Shimoyama I. Forward flight of swallowtail butterfly with simple flapping motion. Bioinspir Biomim, 2010, 5(2): 026003 doi: 10.1088/1748-3182/5/2/026003
[21] Fujikawa T, Kikuchi K. Development of a butterfly-style flapping robot with a different ratio of down and up stroke times // The 4th International Conference on Design Engineering and Science. Aachen, Germany, 2017: 212
[22] Fujikawa T, Hirakawa K, Okuma S, et al. Development of a small flapping robot. Mech Syst Signal Process, 2008, 22(6): 1304 doi: 10.1016/j.ymssp.2008.01.008
[23] Zhang Y X, Wang X J, Wang S P, et al. Kinematic and aerodynamic investigation of the butterfly in forward free flight for the butterfly-inspired flapping wing air vehicle. Appl Sci, 2021, 11(6): 2620 doi: 10.3390/app11062620
[24] Sunada S, Kawachi K, Watanabe I, et al. Performance of a butterfly in take-off flight. J Exp Biol, 1993, 183(1): 249 doi: 10.1242/jeb.183.1.249
[25] Srygley R B, Thomas A L R. Unconventional lift-generating mechanisms in free-flying butterflies. Nature, 2002, 420(6916): 660 doi: 10.1038/nature01223
[26] Senda K, Tanaka T, Sawamoto M. Measurement and numerical simulation of a flapping butterfly // Proceedings of 2nd International Symposium on Adaptive Motion of Animals and Machines. Kyoto, 2003: 1
[27] Senda K, Sawamoto M, Shibahara T, et al. Study on flapping-of-wings flight of butterfly with experimental measurement // AIAA Atmospheric Flight Mechanics Conference and Exhibit. Reston, 2004: 5368
[28] Senda K, Sawamoto M, Tanaka T, et al. Analysis on control of flapping-of-wings flight of butterfly // Proceedings of 3rd International Symposium on Adaptive Motion of Animals and Machines. Ilmenau, 2005: 1
[29] Fuchiwaki M, Kuroki T, Tanaka K, et al. Dynamic behavior of the vortex ring formed on a butterfly wing. Exp Fluids, 2013, 54(1): 1450 doi: 10.1007/s00348-012-1450-x
[30] Fuchiwaki M, Imura T, Tanaka K. Characteristics of butterfly wing motions and their application to micro flight robot // 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Orlando, 2009: 1019
[31] Huang H, Sun M. Forward flight of a model butterfly: Simulation by equations of motion coupled with the Navier–Stokes equations. Acta Mech Sin, 2012, 28(6): 1590 doi: 10.1007/s10409-012-0209-1
[32] Elzinga M J, van Breugel F, Dickinson M H. Strategies for the stabilization of longitudinal forward flapping flight revealed using a dynamically-scaled robotic fly. Bioinspir Biomim, 2014, 9(2): 025001 doi: 10.1088/1748-3182/9/2/025001
[33] Keennon M, Klingebiel K, Won H. Development of the nano hummingbird: A tailless flapping wing micro air vehicle // 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Nashville, 2012: 588
[34] Wood R J. Liftoff of a 60 mg flapping-wing MAV // 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego, 2007: 1889
[35] Tijmons S, Karásek M, de Croon G. Attitude control system for a lightweight flapping wing MAV. Bioinspir Biomim, 2018, 13(5): 056004 doi: 10.1088/1748-3190/aab68c
[36] Karásek M, Muijres F T, De Wagter C, et al. A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science, 2018, 361(6407): 1089 doi: 10.1126/science.aat0350
[37] Tanaka H, Hoshino K, Matsumoto K, et al. Flight dynamics of a butterfly-type ornithopter // 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, 2005: 2706
[38] 雷亚超. 仿蝴蝶微型扑翼机飞行原理及扑翼机构研究[学位论文]. 南昌:南昌航空大学, 2013 Lei Y C. Research on Flapping-Wing Flight Principle and Mechanism of the Imitating Butterfly Ornithopter [Dissertation]. Nanchang: Nanchang Hangkong University, 2013
[39] eMotionButterflies | Festo USA[EB/OL]. [2023-10-10]. https://www.festo.com/us/en/e/about-festo/research-and-development/bionic-learning-network/highlights-from-2015-to-2017/emotionbutterflies-id_33454/
[40] Chi X K, Wang S P, Zhang Y X, et al. A tailless butterfly-type ornithopter with low aspect ratio wings // CSAA/IET International Conference on Aircraft Utility Systems (AUS 2018). Guiyang, 2018: 1
[41] Zhang Y X, Zhu S H, Yang M Q, et al. Development of a novel butterfly-inspired flapping wing air vehicle // 2023 IEEE 18th Conference on Industrial Electronics and Applications (ICIEA). Ningbo, 2023: 1780
[42] 王少萍, 张益鑫, 池小楷. 一种双翼独立驱动的新型仿生蝴蝶飞行器:中国专利, CN105947196A. 2018-05-18 Wang S P, Zhang Y X, Chi X K. Novel Bionic Butterfly Aircraft with Independently Driven Double Wings: China Patent, CN105947196A. 2018-5-18
[43] 冷烨, 张卫平, 周岁, 等. 仿生蝴蝶飞行器设计分析. 机械设计与研究, 2019, 35(4):32 Leng Y, Zhang W P, Zhou S, et al. Design and research of bionic butterfly aircraft. Mach Des Res, 2019, 35(4): 32
[44] 黄海丰, 贺威, 邹尧, 等. 基于线驱转向的仿蝴蝶扑翼飞行机器人系统设计与控制. 控制理论与应用, 2022, 39(7):1203 doi: 10.7641/CTA.2021.10855 Huang H F, He W, Zou Y, et al. System design and control of a butterfly-inspired flapping-wing aerial robot based on wire-driven steering. Contr Theory Appl, 2022, 39(7): 1203 doi: 10.7641/CTA.2021.10855
[45] 王少萍, 张益鑫, 池小楷, 等. 一种连翅仿生蝴蝶扑翼飞行器:中国专利, CN106184746A. 2018-08-10 Wang S P, Zhang Y X, Chi X K, et al. Wing-Connected Butterfly-Simulated Flapping-Wing Air Vehicle: China Patent, CN106184746A. 2018-8-10
[46] 王少萍, 张益鑫, 黄文皓, 等. 一种仿生扑翼飞行器及其控制方法:中国专利, CN112278267A. 2022-03-22 Wang S P, Zhang Y X, Huang W H, et al. Bionic Ornithopter and Control Method Thereof: China Patent, CN112278267A. 2022-3-22
-
期刊类型引用(1)
1. 高怡宁,冯军,艾俊强. 仿生技术在航空工程中的应用进展. 航空工程进展. 2024(06): 27-38 .  百度学术
百度学术
其他类型引用(0)
计量
- 文章访问数: 4407
- HTML全文浏览量: 1557
- PDF下载量: 1364
- 被引次数: 1
